基于陀螺仪和双全向从动轮的坐标定位系统
在机器人的系统中,实时获取机器人当前位于场地的精确坐标显得尤为重要,并以此控制机器人的运动。本文旨在讲解基于陀螺仪和双全向从动轮的快速精确坐标定位系统。
机械模型
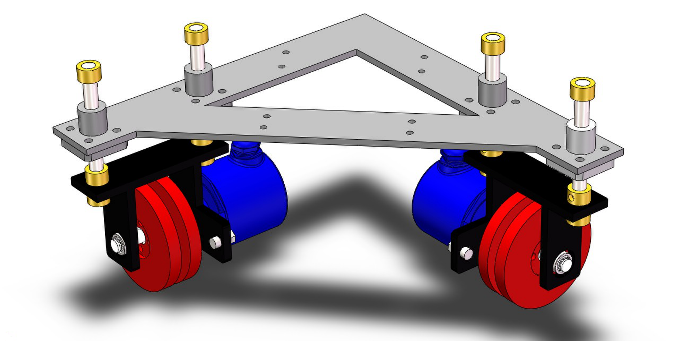
首先,建立机械模型,如图1所示,图中的两个轮子均为全向轮。为了方便模块化,使用了一体化结构设计。两个全向轮正交装配,全向轮的轮轴连接着编码器,并用直线轴承结合压簧,使全向轮时刻贴紧地面,减少打滑或悬空情况的发生。
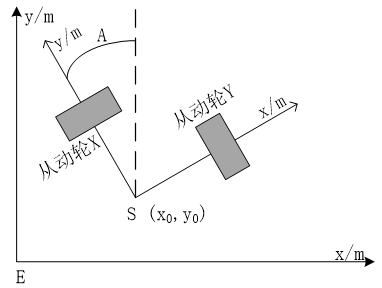
其次,对定位模型建模。从动轮坐标系S的原点在地面坐标系E中的坐标为( $x_{0}$ ,$y_0$),夹角为A(逆时针为正),如下图所示。其中X,Y从动轮分别记录S坐标系中的x轴和y轴方向的位移。
先分析简单的情况。假设机器人运动过程中偏航角不变,只进行平移运动。则由S坐标系到E坐标系的变换矩阵,可由公式(1)所表示,其中A表示S坐标系相对与E坐标系的夹角(逆时针为正)。
假设已知t时刻的机器人坐标为( xt , yt ),并且在t时刻之后的∆t时间内,机器人只进行直线平移运动,可以得到公式(2)所示的t+∆t时刻的机器人坐标计算公式。其中,xs和ys分别表示在∆t时间内,X从动轮的位移记录和Y从动轮的位移记录。
再分析复杂的情况,如机器人不仅进行平移运动,还混有各种复杂的弧线运动。假设从动轮坐标系在t时刻与地面坐标系的夹角为At,t+∆t时刻与地面坐标系的夹角为At+∆t。因机器人的运动一般较为平滑,偏航角不会突变,所以当∆t极小时,可以认为At+∆t与At近似相等。因此,在极短的时间∆t内,可以把这段运动等效为平移运动,只需将公式(1)中A进行重新定义,即可得到机器人坐标的关于时间的递推公式,如公式(3)-公式(5)所示。其中,xs和ys分别表示在∆t内,X从动轮的位移记录和Y从动轮的位移记录。
需要注意的是,这里得到的是递推公式。利用这些公式,可以由前一时刻的坐标和从动轮陀螺仪的记录,计算出当前时刻的坐标。所以,在已知机器人初始坐标的情况下,可以利用上述公式不断迭代,快速地计算出当前坐标。这个模型的精确度依赖于迭代间隔∆t,∆t越小,模型的精确度越高。下一节将进行具体的误差分析。
误差分析和模型改进
上一节中,已将模型基本建好,现在来分析这个模型的误差,并进行优化和补偿。
首先是传感器的自身误差,这也是所有惯性定位方法中不可忽视的。在本文提出的定位模型中,主要体现在单轴陀螺仪的误差,它影响机器人的偏航角测量。由公式(3)-公式(5)可以看出,偏航角对模型的精度影响很大。对此的解决办法可以使用高精度单轴陀螺仪,如光纤陀螺仪等。也可以使用各种数字滤波方法,如卡尔曼滤波等。还可以辅以外界参考来进行偏航角数据融合,如电子罗盘等。
其次是模型的计算误差。建立这个模型的思想是一种微元的思想,因此,模型的精确度主要依赖于迭代的时间间隔∆t。所以在传感器采样周期允许的范围内,应该尽量缩短∆t。另外,这个模型主要是将弧线近似为直线,所以也可以尽量减少弧线运动,由此让定位更加精确。
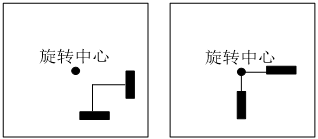
最后是从动轮的测量误差。虽说使用全向从动轮可以避免积分误差,得到精确的位移测量,但从动轮依靠地面来进行位移测量,这对地面的平整度要求较高。另外,当机器人进行自旋运动时,真实坐标变化不大。如果使用图3左边的安装方式,在机器人进行自旋运动时,从动轮也会跟着转动,模型会认为坐标改变,会造成较大的累计误差。
相对于传感器误差和模型计算误差来说,从动轮造成的误差更大,也更需要解决。所以,下面主要阐述对地面不平整和旋转冗余量进行补偿和优化方法。
对于旋转冗余量问题,一个很自然的解决办法,就是从机械模型入手。让两个从动轮的轮毂延长线交于运动模型的旋转中心,如图3右边的安装方式所示。这样,机器人自旋时,两个从动轮都不会有记录值。但它加大了机械的设计和装配难度,也增大模块化的难度。所以,使用软件方式补偿是一种更好的选择。可以先记录下机器人自转时,两个从动轮分别记录的位移,以此得到一个旋转角度与旋转冗余量的线性关系。这样,可以在每次坐标计算前,把旋转冗余量去掉。
地面不平整的问题,这也是一个关键的问题。从动轮必须时刻贴紧地面,否则会悬空或打滑。而地面多少会凹凸不平,这就造成从动轮记录的位移实际上比真实的位移要大。举个例子,如果从动轮经过横截面如图4左边所示的地面,被记录的量是弧线S的长度,而不是直线L的长度。
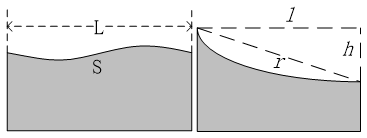
这里依然可以用微元法思想,对地面不平整进行补偿。假定地面的凹凸程度是较为连续的,不会出现很大的断层。在较短的时间内,可以将从动轮经过的弧线轨迹近似为直线,如图4右边所示的r直线。需要得到的量为真实水平位移,也就是图4右边所示的l直线的长度。而l与r、h构成直角三角形,当已知r和h,即可求出l。r可以用从动轮的位移测量值来近似。h为两次距离记录之间的高度差,可以使用直线位移传感器配合数模转换模块来得到。
